Behavior Trees or Finite State Machines
Behavior Trees and Finite State Machines (FSMs) are widely used techniques for organizing complex gameplay and AI logic. Although both can be used to model behavior, they are built around different core responsibilities and excel at different layers of system design.
Behavior Trees are optimized for decision-making systems that must react dynamically to changing conditions, prioritize actions, and handle complex branching logic. Finite State Machines are optimized for state-driven control systems that manage stable modes of operation, enforce structured flow, and define explicit transitions between behaviors.
In practice, these paradigms are rarely exclusive. Well-architected systems often combine decision-making logic with state-based control, creating clear separation between choosing actions and executing them.
Decision-Making vs State Control
At a high level, these approaches address two separate concerns:
- Decision-making: Determining what should happen next.
- State control: Managing which mode or phase is currently active.
Understanding this distinction helps clarify when each approach is most effective.
Behavior Trees : Decision-Making Systems
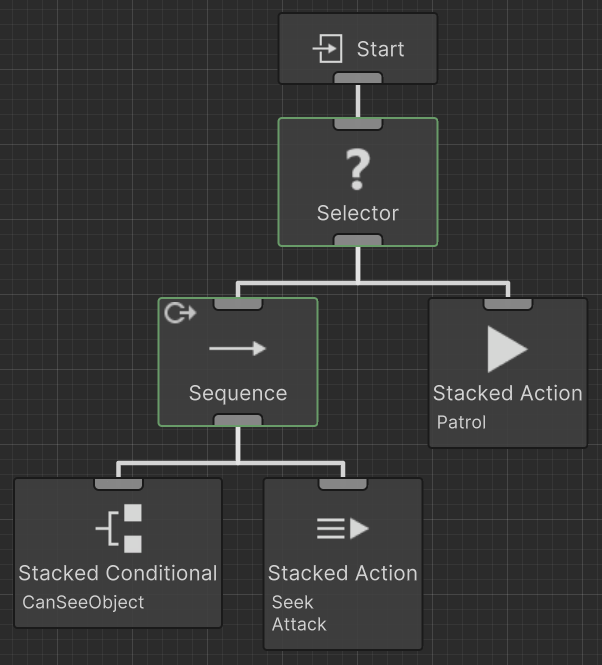
Behavior trees are designed around evaluating conditions and selecting actions. They continuously assess the game state and determine the most appropriate behavior to execute. They are particularly strong at:
- High-level decision-making.
- Priority-based behavior selection.
- Reactive logic that adapts to changing conditions.
- Managing complex branching choices.
Finite State Machines : State-Based Control Systems

Finite state machines focus on managing discrete states and transitions between them. Each state represents a distinct mode of operation, and transitions define how and when the system moves between modes. They are particularly strong at:
- Controlling execution flow.
- Managing stable modes or phases.
- Enforcing structured sequences.
- Handling predictable behavior cycles.
Core Differences
| Decision-Making (Behavior Trees) | State Control (FSMs) |
|---|---|
| Select what action to perform | Control current mode or phase |
| Continuously evaluate conditions | Transition between explicit states |
| Dynamic and reactive | Structured and predictable |
| Handle complex branching logic | Handle flow and sequencing |
| Scale well for decision complexity | Can become complex as states grow |
When to use a Decision-Making System
Use a Behavior Tree when:
- Multiple actions are possible at any time.
- Logic depends on changing conditions.
- Priority and fallback behaviors are required.
- Systems must adapt in real time.
Typical examples include AI behavior selection and complex gameplay logic.
When to use a State Control System
Use a FSM when:
- Behavior is organized into distinct modes.
- Flow follows predictable transitions.
- Entry and exit logic must be explicit.
- Sequenced behavior is important.
Common examples include animation states, gameplay phases, and mode-based systems.
Using Both Together
In many projects, decision-making and state control are used together:
- A decision-making system determines which state should be active.
- A state control system manages what happens within that state.
This layered approach keeps logic clear, scalable, and easier to maintain