greatstudios
New member
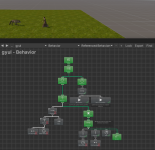
I am trying to evaluate my NPC to seek a hiding spot transform when she sees the wolf. With only the 'Can See' task, it works
1. However, I want to evaluate either Can See or Within Distance. Neither of them works.
2. Once I get these 2 conditions working, how can I continually check for when the wolf comes back. So far, once she hides, even if the wolf walks past her she doesn't evaluate again.
I've tried using the parallel and parallel selector tasks and nothing works.


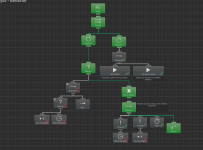
1. However, I want to evaluate either Can See or Within Distance. Neither of them works.
2. Once I get these 2 conditions working, how can I continually check for when the wolf comes back. So far, once she hides, even if the wolf walks past her she doesn't evaluate again.
I've tried using the parallel and parallel selector tasks and nothing works.