snarlynarwhal
New member
I am having trouble setting up my behavior tree and I think it's because I do not fully understand how hierarchical conditional aborts work.
Intended Behavior
If an enemy is within `Buffer` units from their target, the enemy should back up (Flee to `Buffer` distance) before attacking. In this case, the Observer enemy should back up 3 units before firing it's laser beam, but it does not (you can see the player character's blue hair behind the Observer). It works as intended 90% of the time, but occasionally, it gets "stuck" in the following scenario:
Unintended Behavior
Occasionally the enemy gets "stuck" next to the target and does not back up. Instead it continues to attack without backing up (Fleeing to `Buffer` distance).

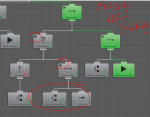
This portion of the behavior tree handles attack. `Buffer` that defines how much space to leave between themselves and the target. The leftmost branch (`Inverter` + `Check Distance`) makes sure that they're not within `Buffer` distance of the target. If they are, they flee to buffer distance in the middle branch (`Sequencer` + `Check Distance` + `Flee`). The rightmost branch makes sure they're still in range before attacking (`Sequencer` + `Check Distance` + `Attack Target`).

My Understanding
From what I understand from conditional aborts, I would expect the entire left branch to continue to be re-evaluated in the background. I would expect the `Selector` to start with the leftmost `Check Distance`, which would return `Success` since the enemy is within `Buffer` distance from the player. Then the `Inverter` would flip this to a `Failure` causing the `Selector` to go to the `Sequencer` (middle). This second `Check Distance` is the same as the first, so should also return `Success` which should finally lead to the `Flee` task. Again, it functions like this most of the time. Not sure exactly what causes it to get in the "stuck" state.
Intended Behavior
If an enemy is within `Buffer` units from their target, the enemy should back up (Flee to `Buffer` distance) before attacking. In this case, the Observer enemy should back up 3 units before firing it's laser beam, but it does not (you can see the player character's blue hair behind the Observer). It works as intended 90% of the time, but occasionally, it gets "stuck" in the following scenario:
Unintended Behavior
Occasionally the enemy gets "stuck" next to the target and does not back up. Instead it continues to attack without backing up (Fleeing to `Buffer` distance).
This portion of the behavior tree handles attack. `Buffer` that defines how much space to leave between themselves and the target. The leftmost branch (`Inverter` + `Check Distance`) makes sure that they're not within `Buffer` distance of the target. If they are, they flee to buffer distance in the middle branch (`Sequencer` + `Check Distance` + `Flee`). The rightmost branch makes sure they're still in range before attacking (`Sequencer` + `Check Distance` + `Attack Target`).
My Understanding
From what I understand from conditional aborts, I would expect the entire left branch to continue to be re-evaluated in the background. I would expect the `Selector` to start with the leftmost `Check Distance`, which would return `Success` since the enemy is within `Buffer` distance from the player. Then the `Inverter` would flip this to a `Failure` causing the `Selector` to go to the `Sequencer` (middle). This second `Check Distance` is the same as the first, so should also return `Success` which should finally lead to the `Flee` task. Again, it functions like this most of the time. Not sure exactly what causes it to get in the "stuck" state.







") Similar to programming everyone has their own way of doing things and I think that as long as the behavior tree is working as you want it to then you're doing it correctly. A few extra nodes won't hurt anything.
Similar to programming everyone has their own way of doing things and I think that as long as the behavior tree is working as you want it to then you're doing it correctly. A few extra nodes won't hurt anything.