simcrewdev
New member
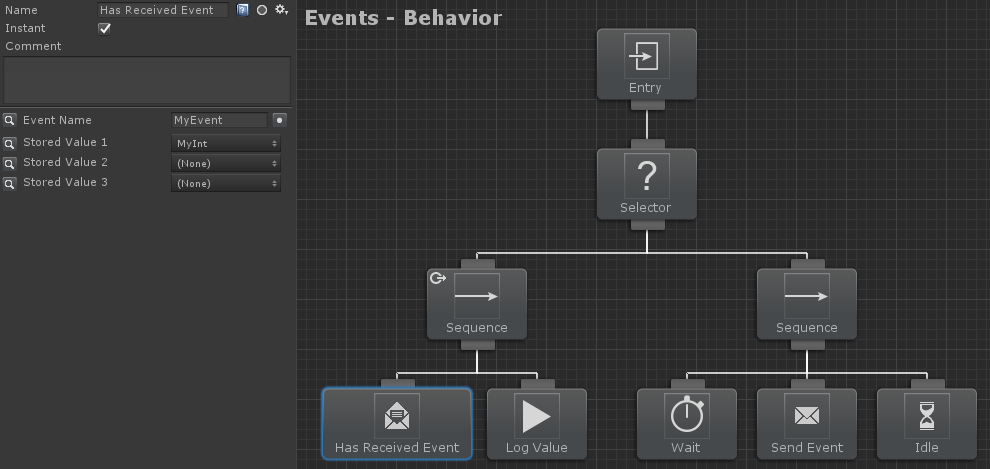
I'm trying to hook-up events coming from a different system to basically control a Behavior Tree.
Sending/receiving events works quite easily, however I'm struggling to switch between branches based on these events & conditional aborts.
For example:

Whenever I trigger 'Event 2' first, I can still switch to Patrol by triggering 'Event 1', since the abort is set to Lower Priority. However, once the agent is in Patrol, I can no longer abort this task by sending 'Event 2'.
I'm running into the same issue when I use a Conditional Evaluator with 'Has Received Event' as conditional.
What would be the best way to set up such a behavior? Any help would be greatly appreciated!
Sending/receiving events works quite easily, however I'm struggling to switch between branches based on these events & conditional aborts.
For example:
Whenever I trigger 'Event 2' first, I can still switch to Patrol by triggering 'Event 1', since the abort is set to Lower Priority. However, once the agent is in Patrol, I can no longer abort this task by sending 'Event 2'.
I'm running into the same issue when I use a Conditional Evaluator with 'Has Received Event' as conditional.
What would be the best way to set up such a behavior? Any help would be greatly appreciated!

")